















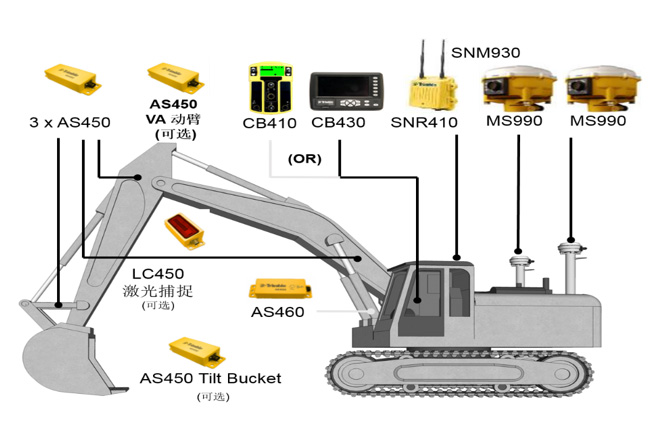
GCS900系统-挖掘机
采用先进的定位技术,实时、准确获知工程机械的三维位置和姿态; 系统通过接受定位系统和各种传感器发送过来的信号,实时记录传感器的数值,对比设计数据与当前机器位置信息,以图形、数值和声音信号等多种方式指示实际刮板与目标工作面的相对位置,引导操作手手动或自动控制铲刀精确施工。
- 系统构成
- 系统原理
- 系统优势和特点
- 系统应用



关注公众号

关注视频号
COPYRIGHT © 2024 广州森达美赛泰能源有限公司 保留所有权利 粤ICP备2021076971号